Tutorial
Changing Height Levels/Adding Walls
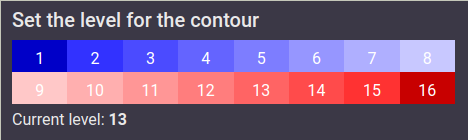
To paint a level directly onto the grid, click on a level from
the options in the top-right, then click and drag on the grid
to draw. You can make these walls by ensuring the level
difference of a cell from its neighbours is at least 5.
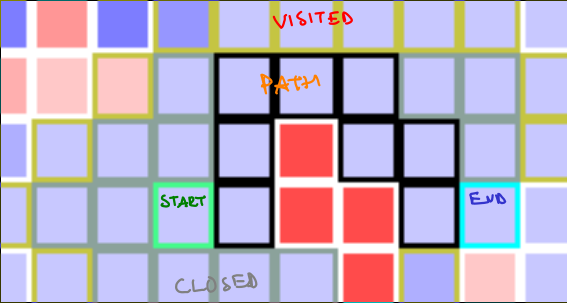
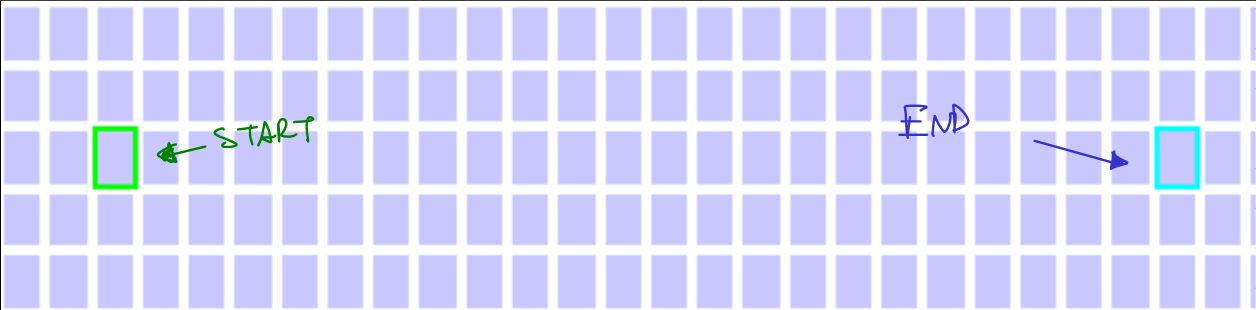
Change the Start/Stop
Click on the start/stop (shown below) and drag to the correct location. Note that it is possible to drag them out of the grid, and not possible to bring them back in, so please don't.
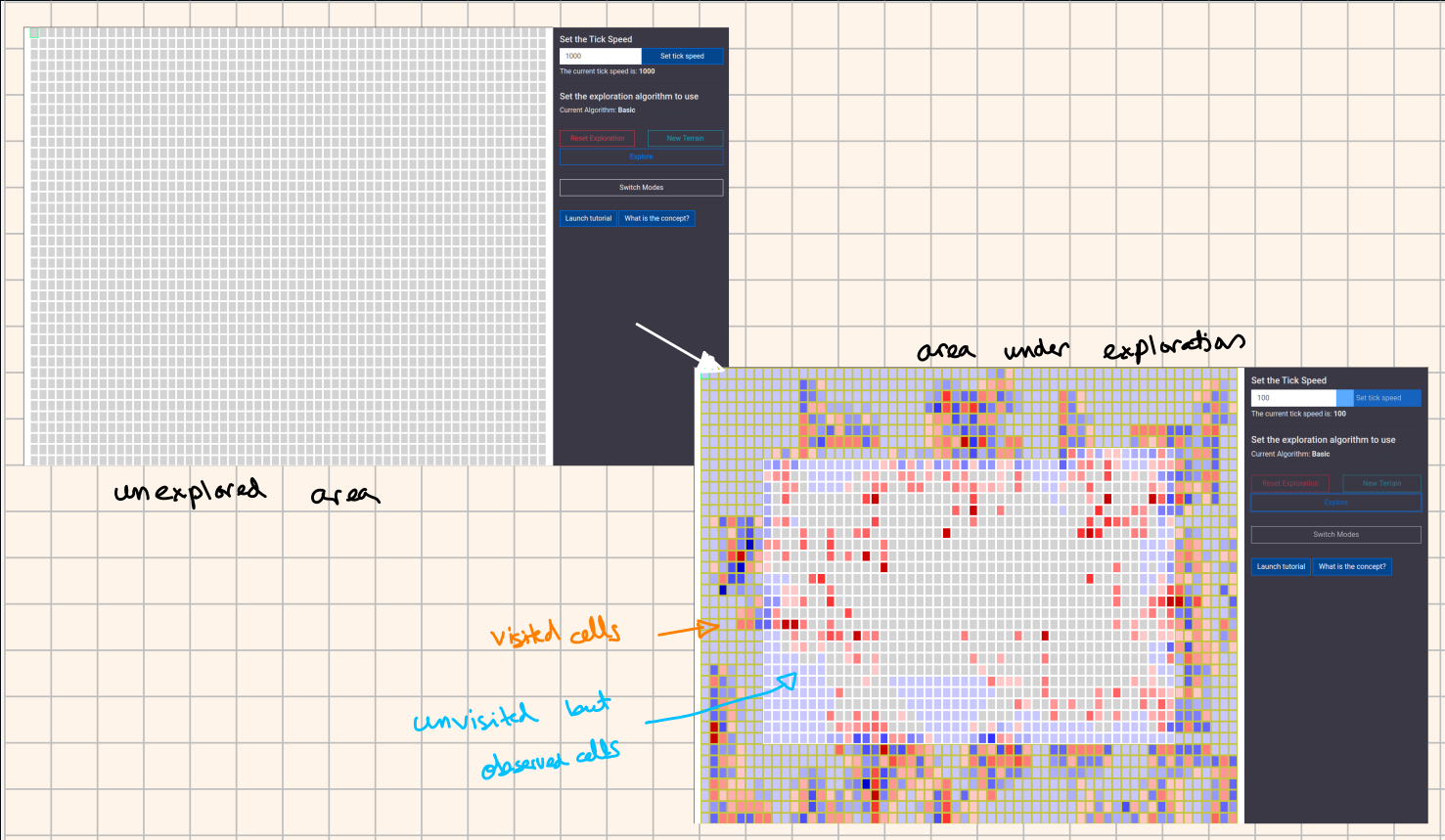
Change the speed of the simulation
Enter a value in the top right under "Set the tick speed" and hit enter. The higher the tick speed, the faster the simulation
Resetting the Map to a flat surface
Click on "Reset Terrain"
Creating a new random map
Click on "Random Terrain"
Toggle between Pathfinding mode and Exploration mode
Click on the "Switch Modes" button. This will reset the map.